工学部 電気電子工学課程/電子機械・ロボット系
知能ロボット研究室
危険な現場で活躍できる「知能ロボット」の研究
災害現場や建設現場などの人間に危険な現場で活躍することができるロボットの実現を目指しています。そのために、カメラや距離センサを用いて周囲の状況を認識し、環境に合わせ自律的に人間をサポートする「知能ロボット」に関する研究を行っています。特に、作業可能な不整地移動ロボットの開発や、人間の視覚特性を考慮したロボットの視覚機能の研究に取り組んでいます。

学位
博士(工学) 東北大学1997年
略歴
| 2007年4月 - 2014年3月 | 東北工業大学 工学部 准教授 |
|---|---|
| 2014年4月 - 現在 | 東北工業大学 工学部 教授 |
研究分野
多脚クローラ型不整地移動ロボットの制御、知能ロボットの自律行動、人間の注視機能とロボット視覚への応用
担当科目
- 制御工学
- マルチメディアシステム
- プログラミングII
研究室所属学生の卒業研修(論文/設計/制作)
- 6脚クローラ型不整地移動ロボットの開発
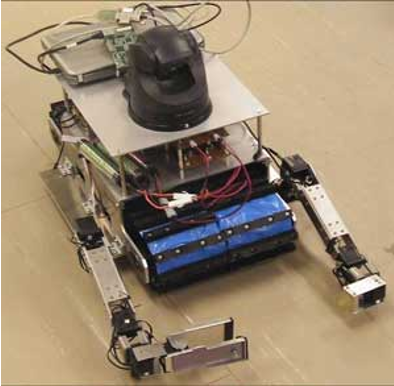
- 双腕移動ロボット用制御システムの構築と操作インターフェースの開発
- ロボット動作映像観察時の注視特性
研究テーマ
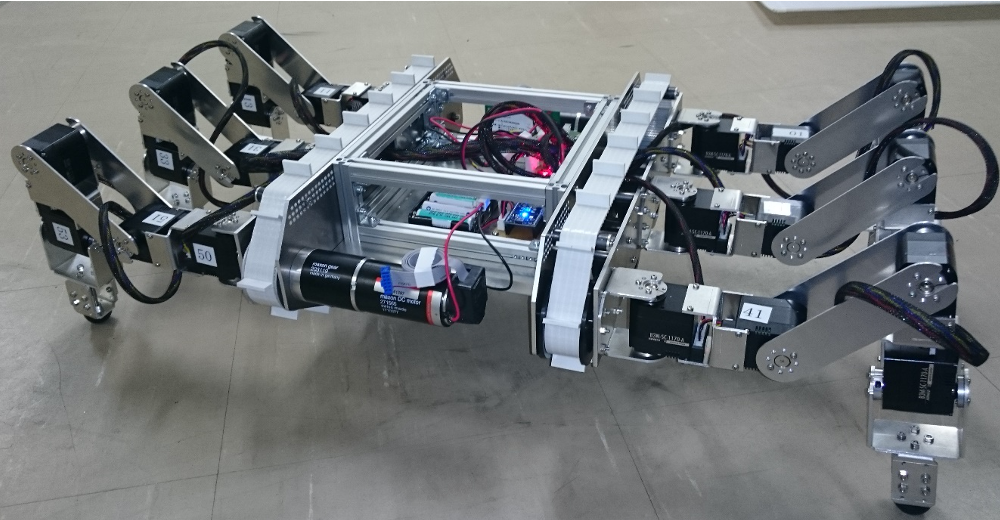
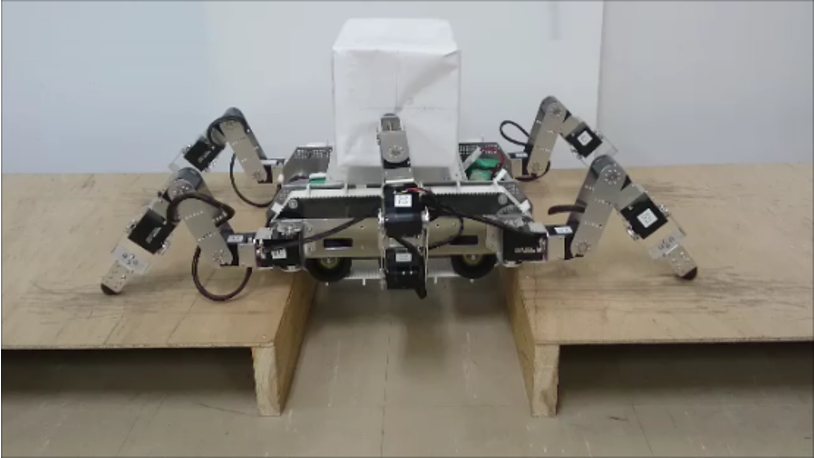
多脚クローラ型不整地移動ロボットの開発
4脚や6脚を有するクローラ型不整地移動ロボットを開発しました。
このロボットはクローラ(キャタピラ)のみでは移動困難な大きな溝でも脚による補助による乗り越えが可能です。
また、脚を腕として用いることで運搬などの作業も行うことができるので、現場での活躍が期待できます。